| > | Home | > | Participants | > | Mailing Lists |
| > | How To Enter | > | Sponsors | > | Theme Song |
| > | About ArtBots | > | Press Archive/Info | > | Previous Shows |
| > | FAQs |
|
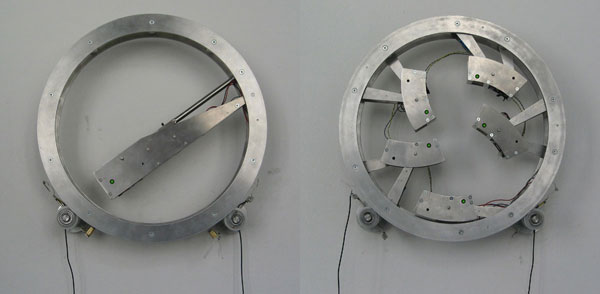
micro.adam & micro.evajulius popp"Then the eyes of both of them were opened, and they perceived that they were naked". (Genesis 3.7) micro.adam and micro.eva are two simple robots who will discover their own bodies and develop body-consciousness on a minimal basis. Like Adam and Eve in paradise became conscious and had to leave the garden, now micro.adam and micro.eva, two machines, are about to cross the border. The main intention of this work is to find a way to visualize and analyze the complex processes of cognition, communication, and adaptation of living systems. I use robots because the behavior of machines is reproducible, analyzable, and in its complexity controllable. micro.adam and micro.eva are the first two robots I have built to find a scientific system with which to formulate my thoughts. In cooperation with the Fraunhofer Institute for Autonomous Intelligent Systems (AIS) I have created two simple and fault proof validation robots for AI. Both robots, circular in design and only different in their inner complexity, are placed in a reduced environment. The robots are limited to one degree of freedom, the (double meaning) rotation about themselves. The robots' motion, rolling on two wheels mounted to a wall, is archived by moving an inward facing actuator. This changes the robot's balancing point, forcing the body to turn to a new balanced position. The robot's turning and rolling is a visualization of the controller's learning progress -- a picture of the emerging body-consciousness. My aim is to find self-adapting algorithms which feel and learn the robot's body behavior, initially not knowing anything about it. The two robots should be 'born' with the same 'empty' programs, which then must form themselves according to the specific body characteristics of each robot. The better these programs know their bodies over time, learning their body characteristics (in that specific environment), the more harmonically they will rotate. Simple body consciousness emerges. The developed "form" of the program describes the behavior of the robot exposed to one environment. By measuring the movement, the algorithms can be benchmarked. Different algorithms, environments, and bodies can be tested, visualised and evaluated. When different patterns emerge, characteristics of body, environment, and controller can be pointed out. At the moment an AIS-Team (www.ais.fraunhofer.de/INDY) headed by Dr. Frank Pasemann is working on the two robots. They are creating neurocontrollers with a technique based on an ALife approach to evolutionary robotics. |
| All materials on this website copyright 2000-2022 douglas irving repetto and the individual artists. |